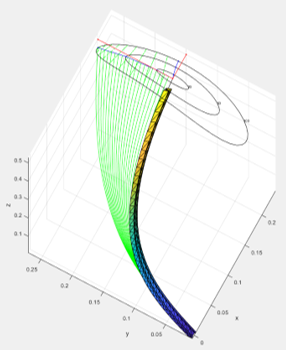
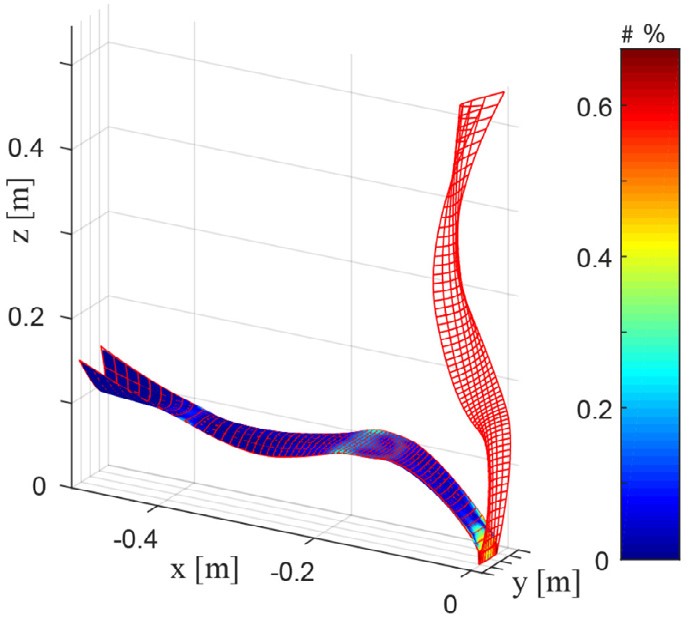
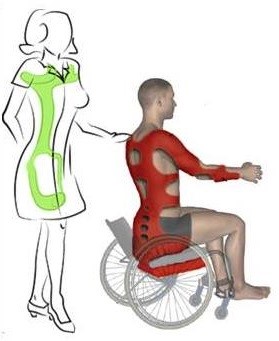
The main aim of P3 is to develop compliant elements for the state of the art exoskeletons which gain all or part of their motion as well as support force from the elastic deformation of spatially curved compliant elements. These elements are carefully designed to conform to the user body contours while generating the required non-linear force-deflection behaviour even for complex (coupled) body motions. Taking advantage of these compliant parts will increase flexibility and slenderness of exoskeletons, simultaneously lessen the need for bulky actuators by contributing passively in the required support forces.
The present project will extend state of the art in the design of compliant mechanisms, focusing on spatial movements, in particular taking the coupled motion into account, provide non-linear force-deflection characteristics, be adjustable to varying loads, increase flexibility, and be built from suitable material structures (including associated manufacturing methods) that enable an extensive range of motion while generating sufficient force to carry body parts. The project will generate theory, modelling, design methodology, and basic technology demonstrators, which will be employed in P6-8 for the development of Exo-Aid prototypes.