
The use of soft robotics systems and soft actuators will eventually enable Wearable Robotics (WR) that are efficient, lightweight, but most importantly, safe. With the recent advances in Additive Manufacturing, soft actuators can be produced relatively fast; and the technology allows for engineered embedded structures that enhance the motion capabilities and human-robot interactions. The merit benefit of soft systems relevant to WR is their human-like compliance that can comfortably align with complex multi-degree-of-freedom joints; large spatial displacements; weight; and ease of application-specific fabrication with additive manufacturing technology. However, little research is done on the design, modeling, and control of such flexible structures by methods commonly accepted in robotics. This deficiency of work reflects the fact that soft robotics is still in the stage of inception, and control-oriented models of soft actuators made of exotic materials are either empirical or too complex.
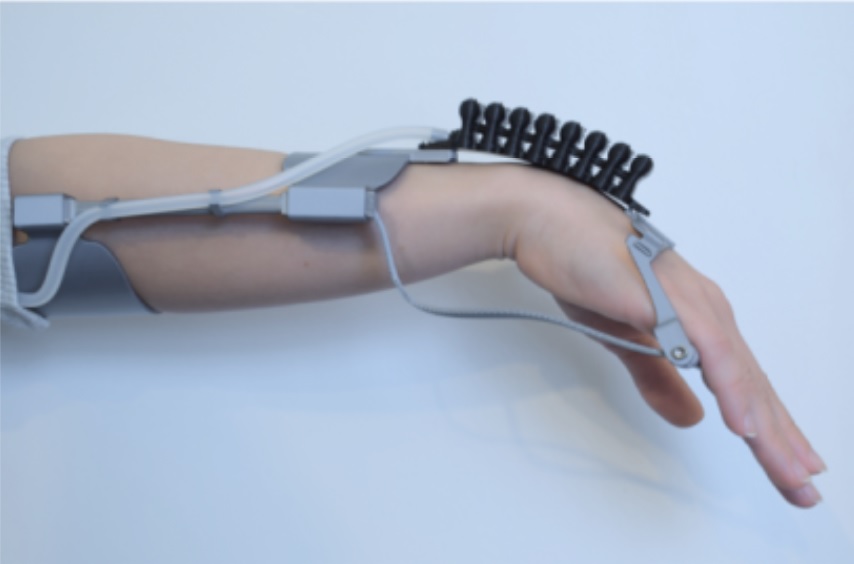
Fig 1. Wrist support with soft actuator 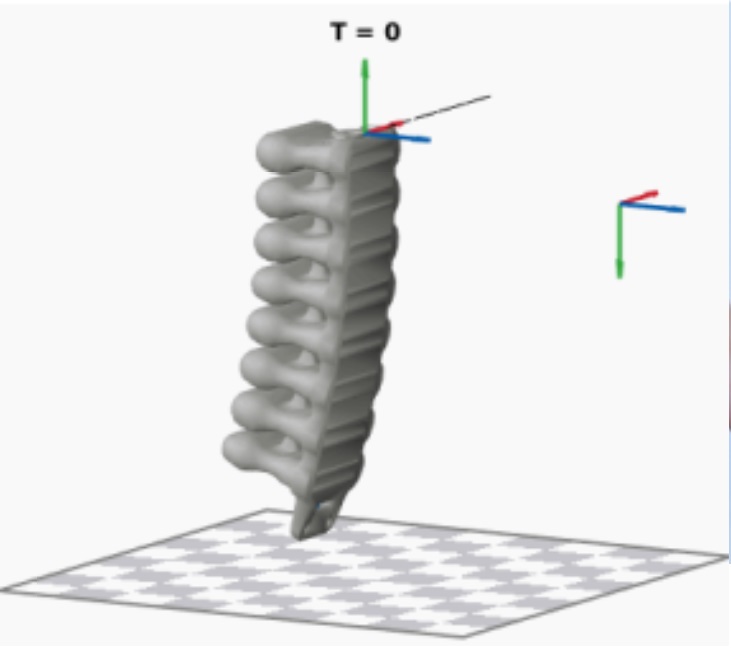
Fig 2. Simulation of soft actuator
This project aims to develop a soft robotic actuator for Exo-Aid systems that assist upper-limb joints, e.g., wrist, elbow, and hip. Not only should the control effort be realizable, but the human-robot interaction should also be comfortable, safe, and robust. We realize these criteria through extensive modeling and novel controller designs. Models of the soft actuators must be accurate, efficient, and be flexible for a variety of control strategies, e.g., impedance control and passivity-based control. With the aid of additive manufacturing, soft actuators can be designed specifically for the human operator, and embedded sensors can be incorporated for closed-loop control. As such, the design and fabrication of these actuators will be an intricate part of the project. Personalization for a patient can be performed via adjusting control gains and 3D-printed customization, and applicability will be validated experimentally.
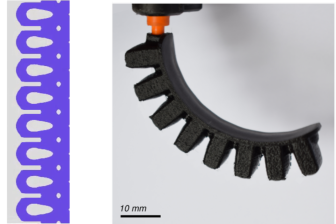
Fig 3. Optimization (left). Printed soft actuator validation (right) 
Fig 4. Experiment of model-based controller
Publications
[1] B. J. Caasenbrood, A. Y. Pogromsky, and H. Nijmeijer, “Dynamic modeling of hyper-elastic soft robots using spatial curves,” IFAC Proc. Vol., 2020.
[2] B. J. Caasenbrood, A. Pogromsky, and H. Nijmeijer, “A Computational Design Framework for Pressure-driven Soft Robots through Nonlinear Topology Optimization,” IEEE International Conference on Soft Robotics, RoboSoft 2020, 2020, pp. 633–638.
[3] B. J. Caasenbrood, A. Pogromsky, H. Nijmeijer, “Energy-based control for soft manipulators using cosserat-beam models,” Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics, ICINCO 2021, 2021, pp. 311–319.
[4] B. J. Caasenbrood, A. Pogromsky, H. Nijmeijer, “Dynamic modeling of hyper-elastic soft robots through differential geometry of curves,” Soft Robotics, 2021. (under review).
[5] B. J. Caasenbrood, F.E. van Beek, H. Khanh Chu, I.A. Kuling, “A Desktop-sized Platform for Real-time Control Applications of Pneumatic Soft Robots,” IEEE International Conference on Soft Robotics, RoboSoft 2022, 2022. (submitted).